生成式模型理解之DDPM
注:涉及大量概率论中的数学推导,不对其推导过程做详细解释,只说明结果的意义是什么
DDPM是什么?
一种生成模型,其核心思想是通过逐步将噪声添加到数据中,学习如何去噪以恢复原始数据。
先讲一下生成式模型
目标
生成出与现实中的数据/我们给出的训练集类似的数据
通用思想
真实的数据(图像、音频等)的分布可能十分复杂,并不方便我们用一个数学模型去描述,也就不能做出好的生成任务。
与此同时,一些简单的分布(高斯、二项)在数学上已经有很完备的理论和工具去描述、处理。于是生成式模型的核心思想就变为,找到把现实数据处理成简单分布,并且能够从简单的分布还原出数据的一套方法。
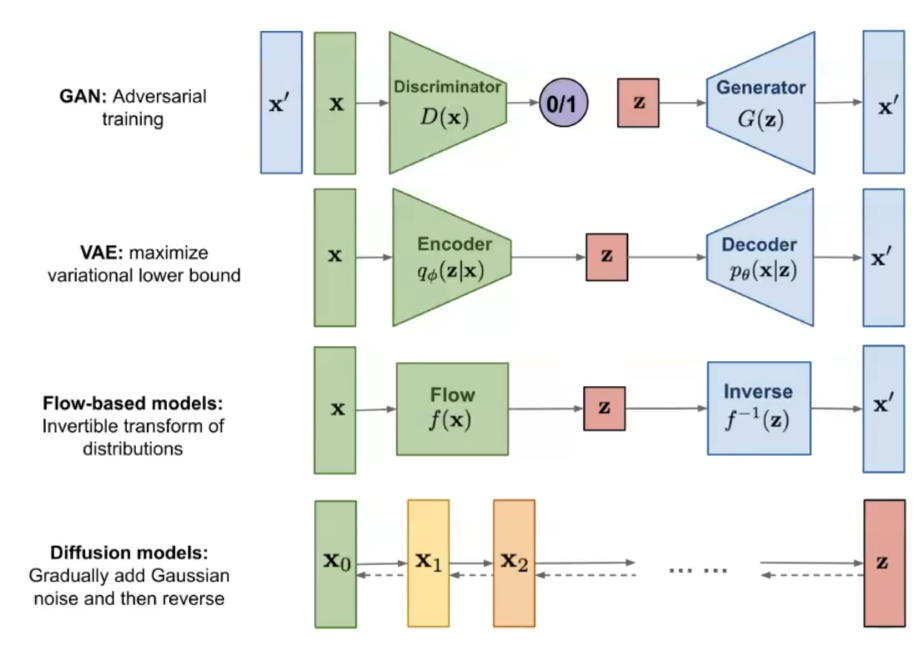
例如,VAE和Flow模型的latent space中就是标准高斯分布。而在Diffusion Models也是如此,我们通过不断添加微小的高斯噪声,使原始分布逐渐趋近于标准高斯分布。(为什么一直加噪声就趋向N(0,1)的原因后面说)
优化目标(设计Loss的源头)
训练目标是使得生成出的数据X的分布与真实数据的分布越接近越好。
θ:网络的参数
:网络生成出的分布
:真实数据的分布
如何衡量“接近”?→ 极大似然估计(找到生成出数据集中各个元素概率之和最高的网络参数θ)
极大似然估计 → 生成出来的数据的分布 与 原始数据的分布 的 KL散度
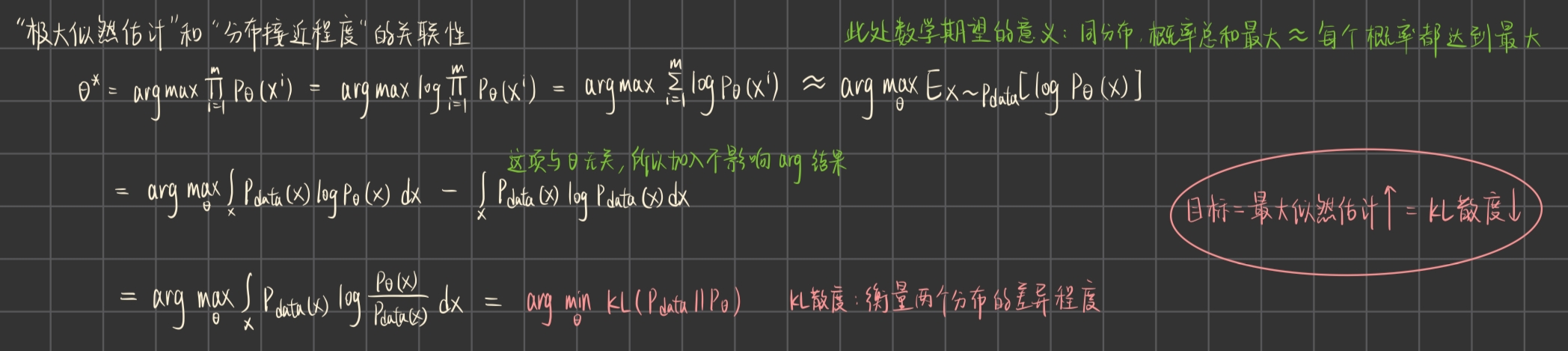
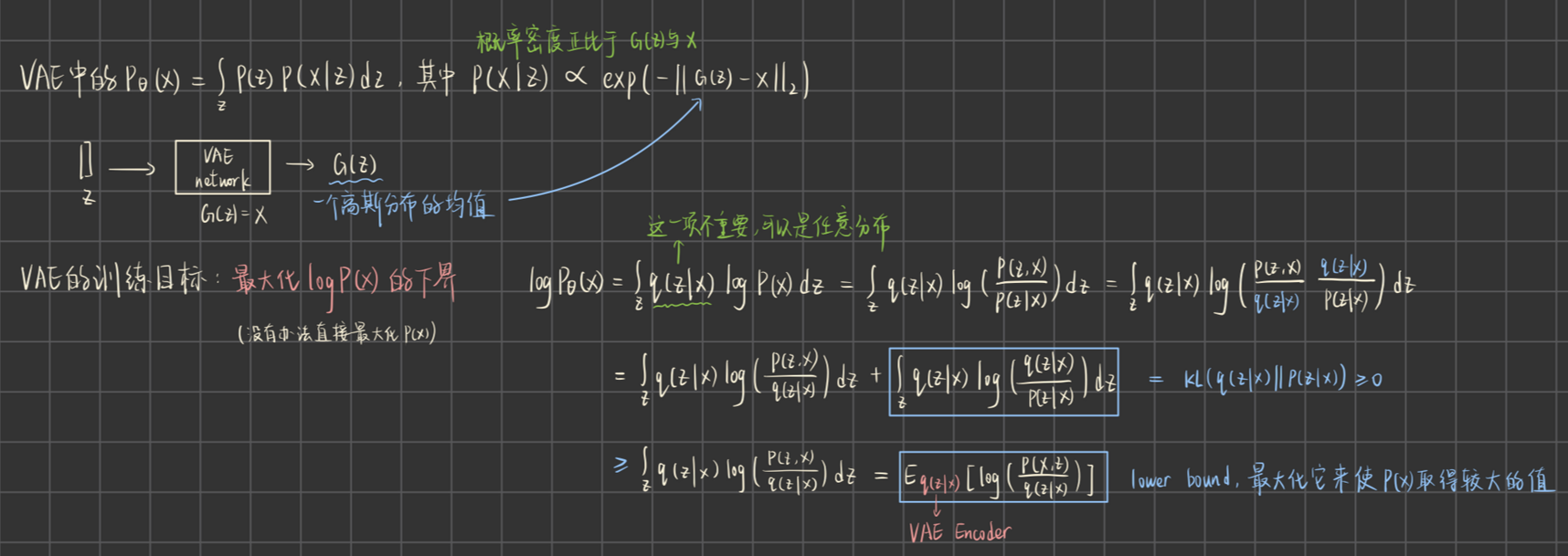
而生成式模型中,我们一般无法直接把优化目标设为“最大化生成出x的概率P(x)”
只能如右图所示,最大化的下界
现在,正式开始讲DDPM
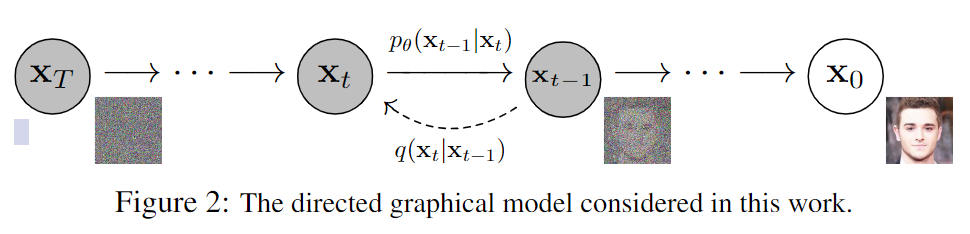
DDPM的整体结构是一个马尔科夫链。
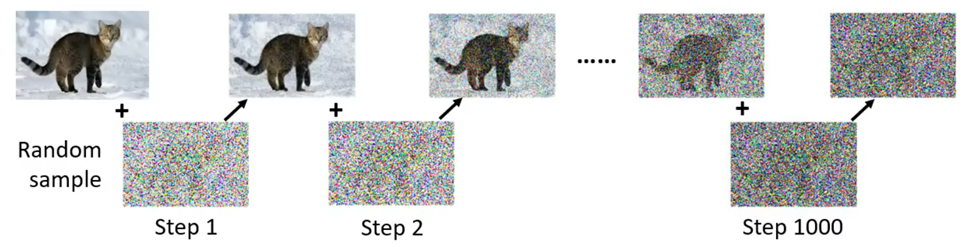
前向过程:对原始图像不断添加微小的高斯噪声,最终变为一个标准高斯分布的噪声
后向过程:对随机采样出来的噪声,用神经网络去拟合每一步加噪的反过程,从预测的分布,用的过程一步步生成对应的
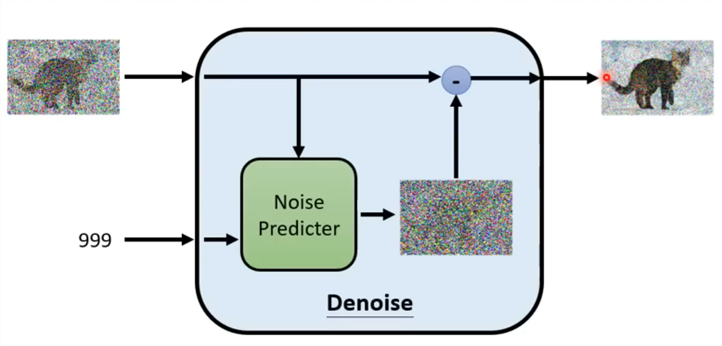
如何训练:
- 原始图片、随机数、加噪得到
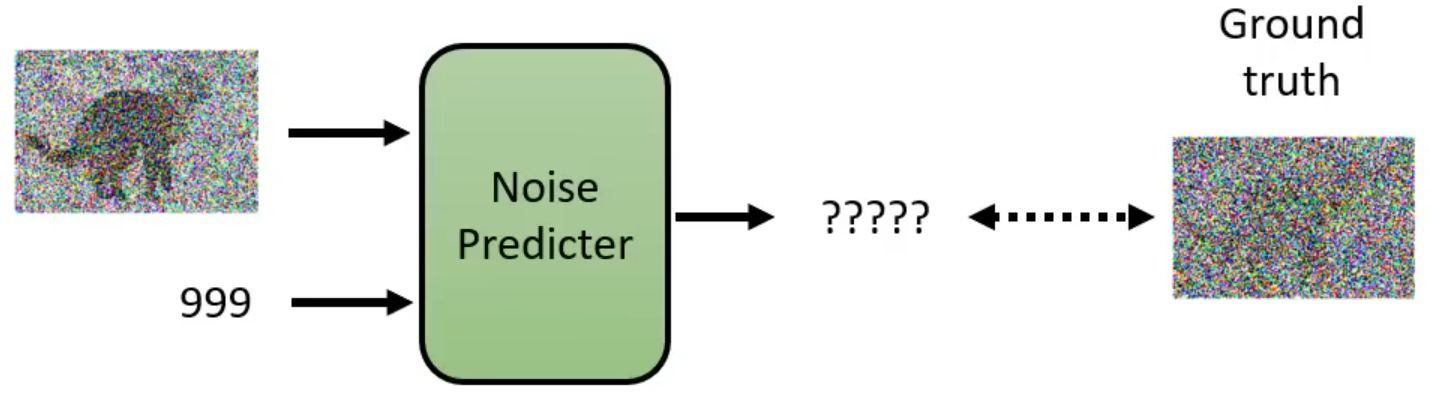
- 对于反向过程中的神经网络,输入和,预测当前加到图片上的噪声
- 预测出的噪声和实际加的噪声做L2 Loss,反向传播
如何生成:
- 从N(0,1)随机采样出噪声
- 循环做T次“预测噪声 + 去噪”
下面依次解答三个问题:
- 为什么一直加噪就服从标准高斯
- 为什么反向过程是在预测噪声
- 如何设计损失函数,使得网络能够预测噪声
1、为什么一直加噪就服从标准高斯
前向过程的公式:
其中β们是一个非常小的线性增大的列表,用代码写出来就是右边的样子(n_steps=T)
1 | self.beta = torch.linspace(0.0001, 0.02, n_steps).to(device) |
按照右边的推导过程,我们可以直接用表示出来
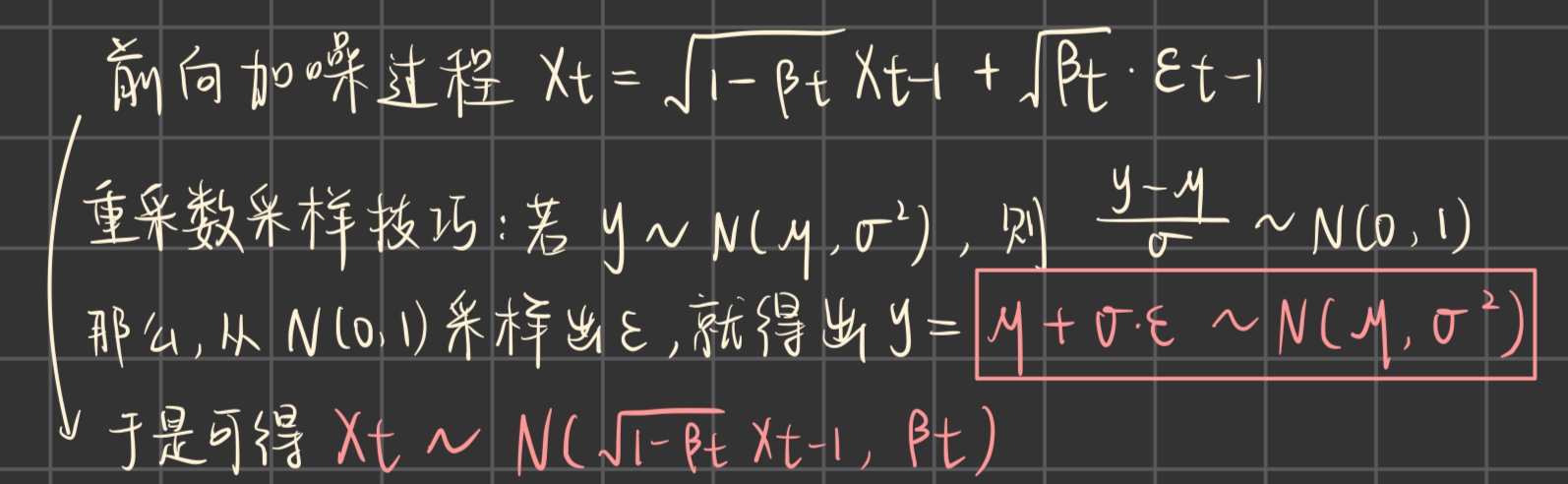
按照重参数采样技巧得
当T非常大的时候, 由一堆(0,1)区间内的α乘起来,趋近于0,
而趋近于1,所以
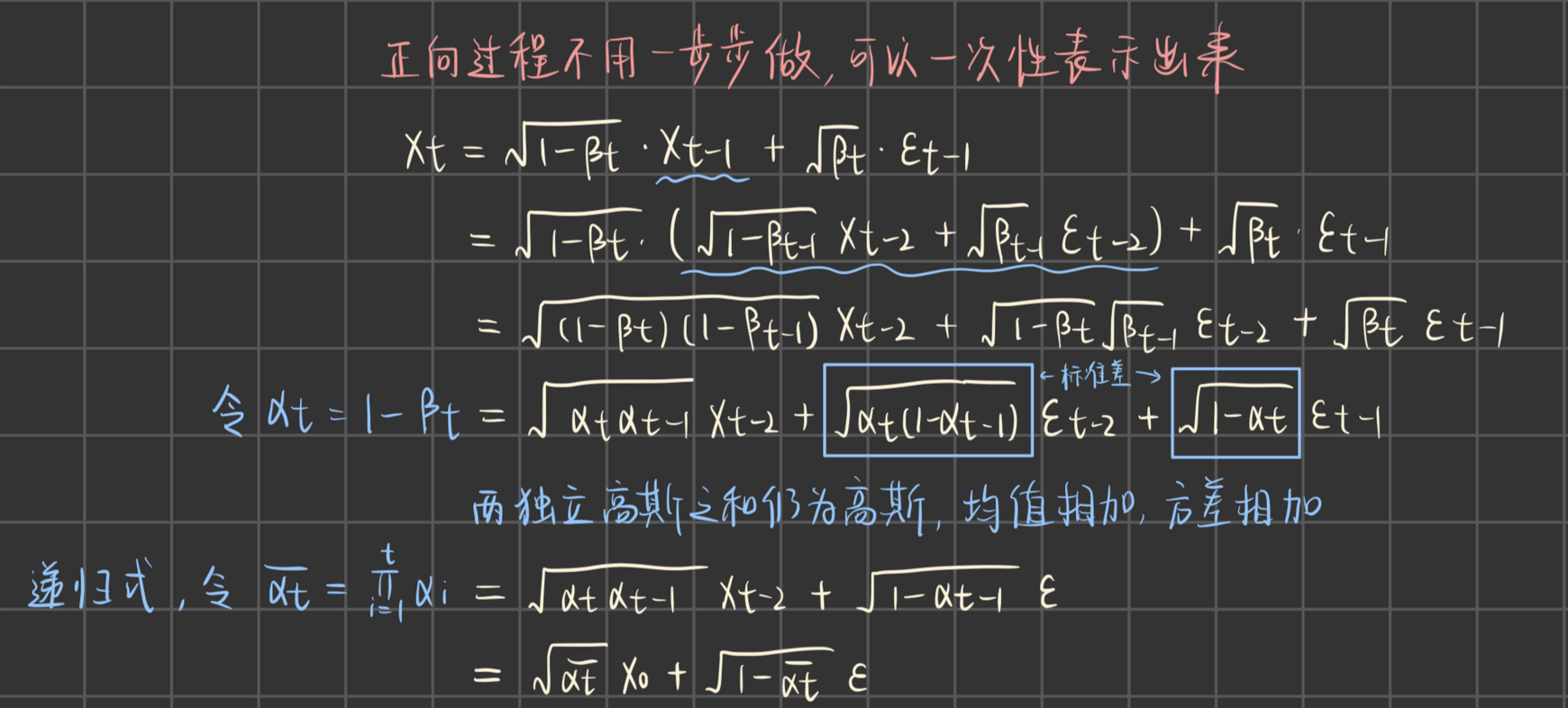
前向过程的单步转移概率推导如右边,结果如下

2、为什么反向过程是在预测噪声
注:以下讨论的是理论上的反向过程应该是怎样,所以用q表示
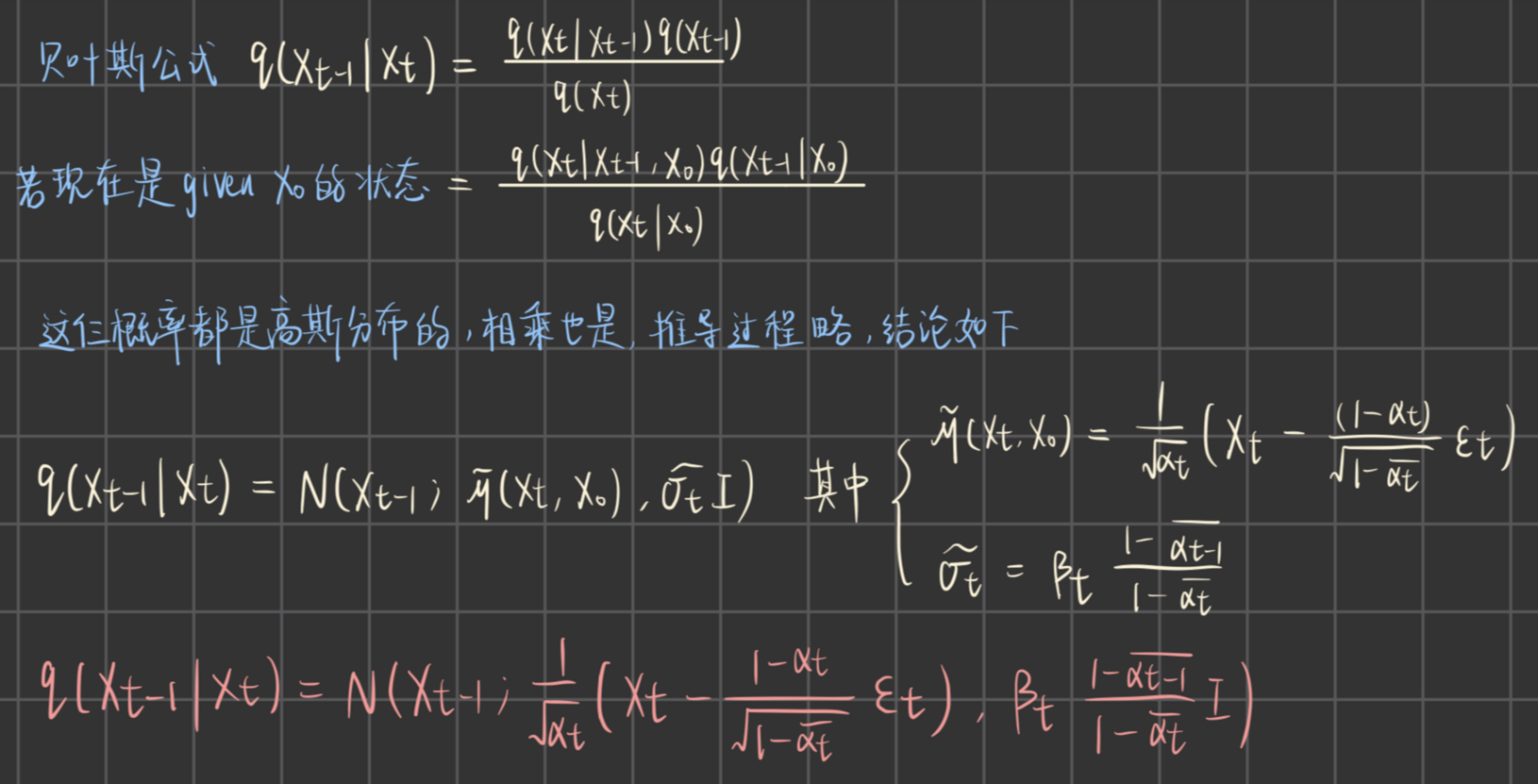
在训练过程中,已知的情况下,我们其实是可以直接推导出单步去噪(→)的表达式的。并且会发现,这个过程,依然是一个高斯分布。推导如右。
那么,反向过程就应该是去模拟这个高斯分布的转移过程。我们预期的生成图像过程是直接随机采样一个就开始的,是not given X0的。右边这个在given X0的情况下得出的式子中,没有显式的X0出现,那一定是有我们在反向过程中不知道的参数。
观察后发现是前向过程中加入的噪声
所以denoiser中网络的工作是在预测噪声
3、如何设计损失函数
真正生成图像的时候,我们用网络来模拟
因为后者是一个高斯分布过程,输入和,输出预测的
所以设计为如下表达式:

基于最前面写的“生成式模型的优化目标”,作者给出了需要最小化的负对数下界(最大化正下界,所以最小化负下界),其推导在论文的附录,如右所示。


继续推导,得出如下需要最小化的式子
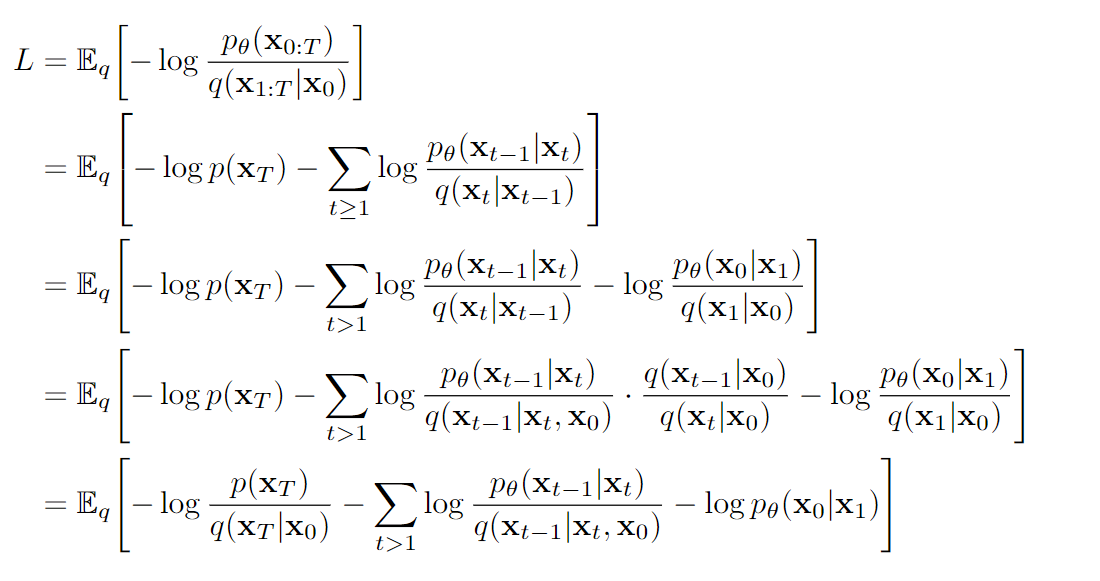

- 第一项:前向过程中最后得到的噪声,要和真正从N(0,1)采样的噪声,KL散度小,这与网络无关!
- 第三项:可以理解成最大化x0和x1的相似度,这也是超参数β决定的,与网络无关!
于是只需要最小化第二项这个KL散度
我们把这两个概率服从的正态分布写出来:
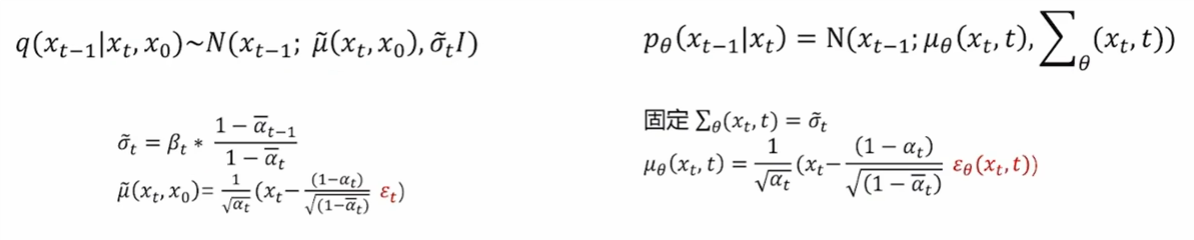
要让两个正态分布接近,就是均值接近+方差接近。而在实践中,作者固定了方差(各种diffusion的文章表明,优化方差几乎没什么收益,不如单干均值)
把两个均值相减,常数项和已知项不看,发现就是,因此将损失函数设计为预测出噪声和实际噪声的L2 Loss
过算法
训练算法(Unet训练的过程)
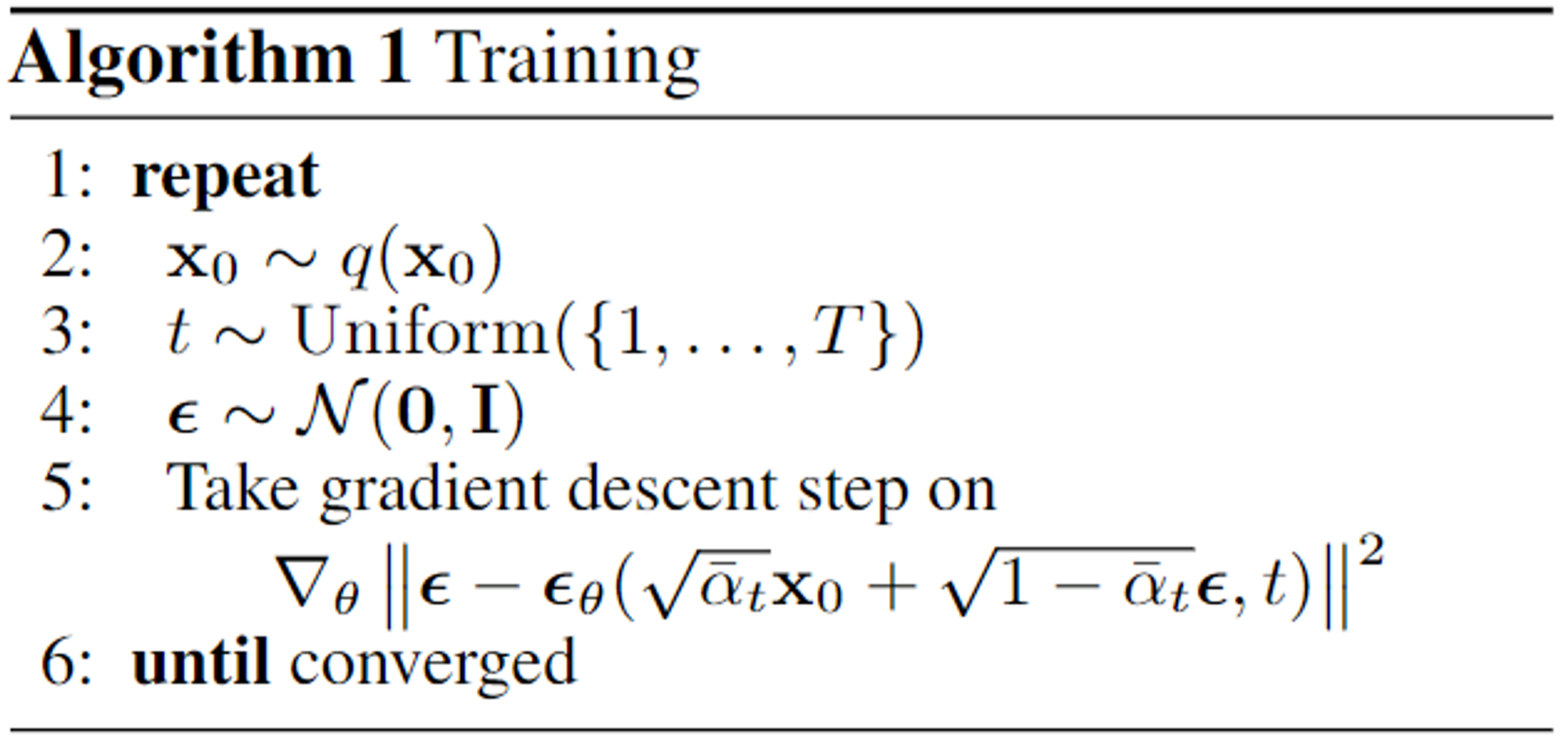
1 | 1. 循环: |
采样算法(生成图像的过程)
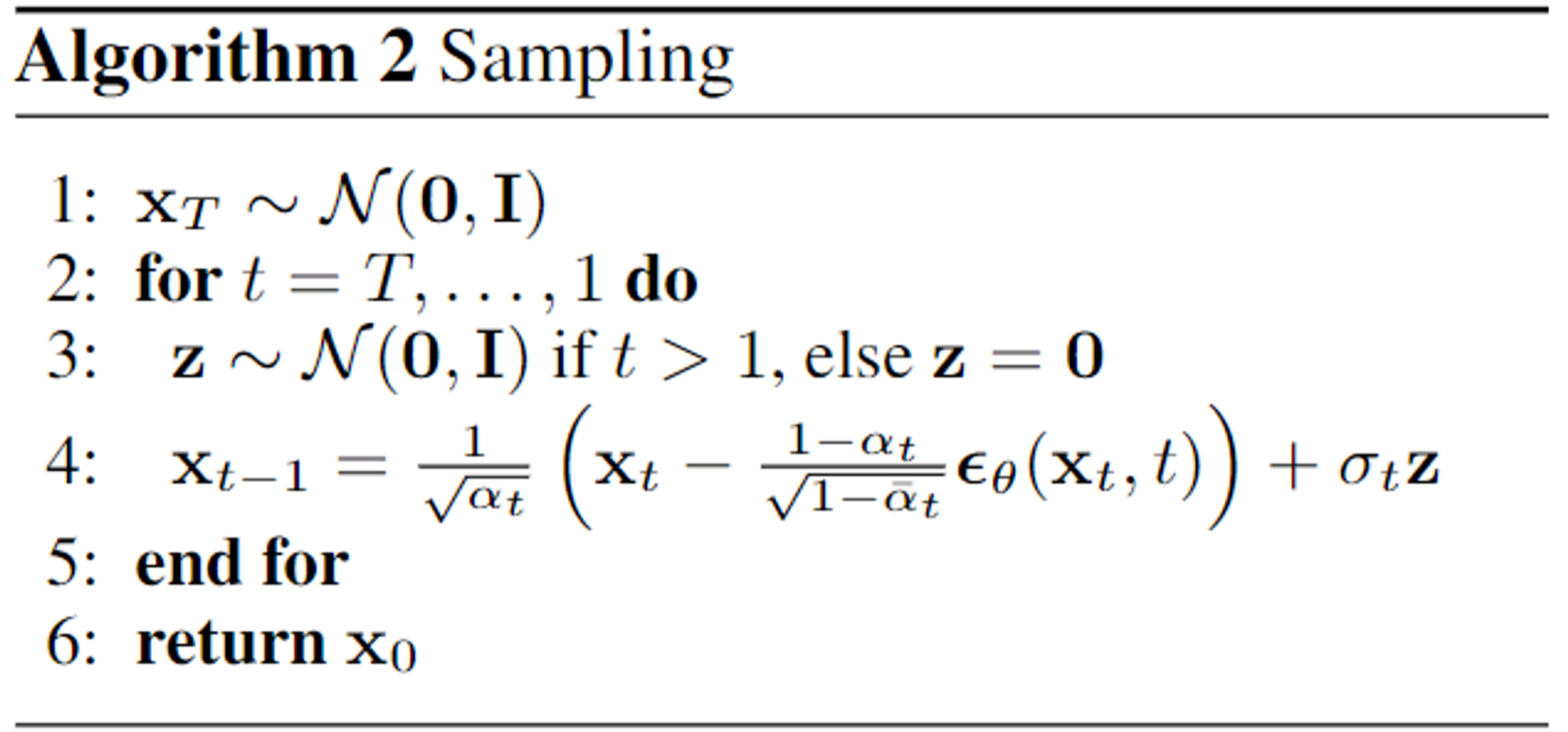
1 | 1. 在标准正态分布中,采样出一个噪声XT |
这里最后还要加的这个很反常,前面也没有提及
实际上,这是为了在生成式模型中让每次的output不固定
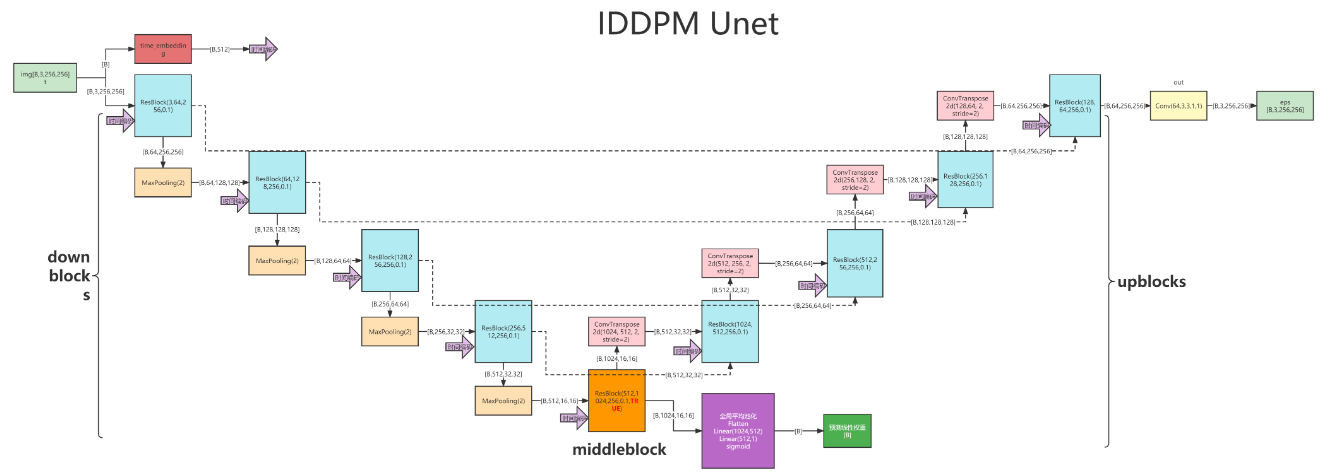
Denoiser中使用的网络:UNet
原始的Unet是一个用于医学图像分割任务的网络,通过卷积下采样,然后直接逆卷积上采样,来对图像的大体区域进行划分
在DDPM中使用的Unet进行了如下改变:
- 使用Embedding,将时间t融入了预测中
- 把卷积层都换成了resnet
- 加入了Attention模块,增强特征表达能力和捕捉全局依赖关系,使得生成的图像更加逼真。